How do I use StereoStream from RealSense? Because it seems it’s not possible to connect it to nodes with CvMat inputs?
The actual use case is that I’d like to use RealSense D435 in range of, say, 0.4-1.0 m and spot three different depths… and currently I need nothing further. So, reading a proper view / image I would be interested only in event on certain depths.
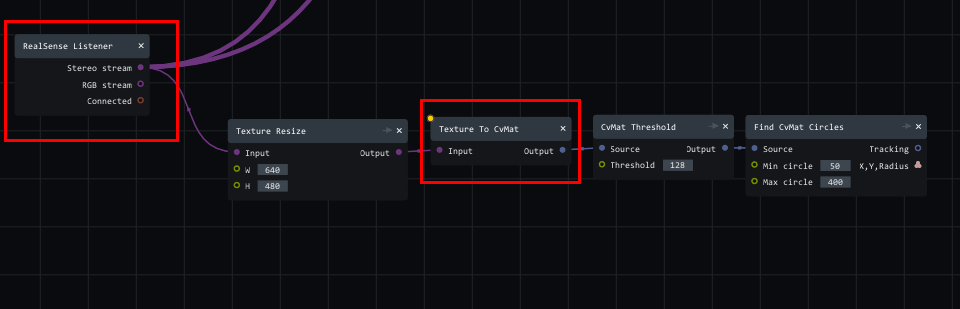
Please note that this conversion is a bit costly, so it is recommended to downscale the Texture beforehand. That’s why I’ve inserted a Texture Resize node. The subsequent CvMat Threshold and Find CvMat Circles is just for illustration in this case.
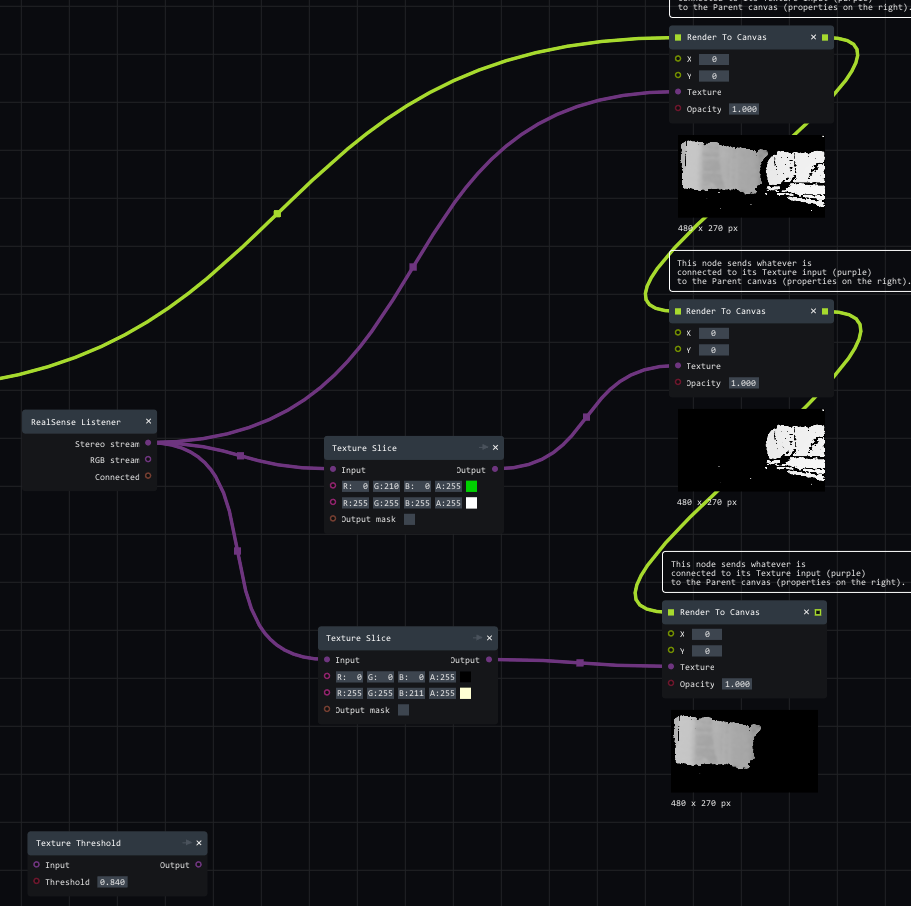
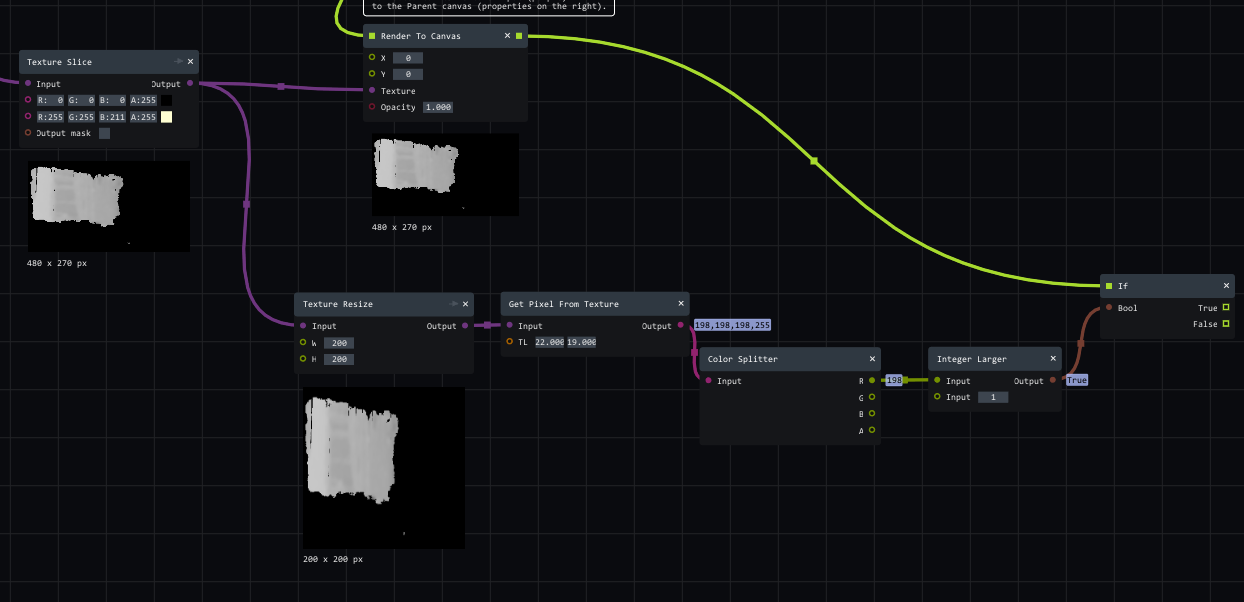
Doing everything with Textures
As to your other question: it might actually be possible to do the whole thing with textures, which is always preferrable.